Sistema de Georradar (GPR) integrado con drones
Sistema de georradar con dron diseñado para una recolección precisa de datos subterráneos.
Sistema de Georradar (GPR) integrado con drones ofrecen una solución GPR aérea avanzada para mapeo subterráneo en diversas aplicaciones, como estudios geofísicos y geofísica arqueológica. Estos sistemas permiten la detección de servicios subterráneos y la exploración subterránea ambiental, siendo ideales para proyectos de infraestructura y análisis del subsuelo. Gracias a la integración de drones con GPR, se optimiza la recopilación de datos en terrenos difíciles. La tecnología GPR multifrecuencia asegura una alta precisión, ofreciendo una solución eficiente para grandes áreas y estudios complejos.
Sectores de aplicación:
Sistema de georradar (GPR) integrado con drones para recolección avanzada de datos subterráneos
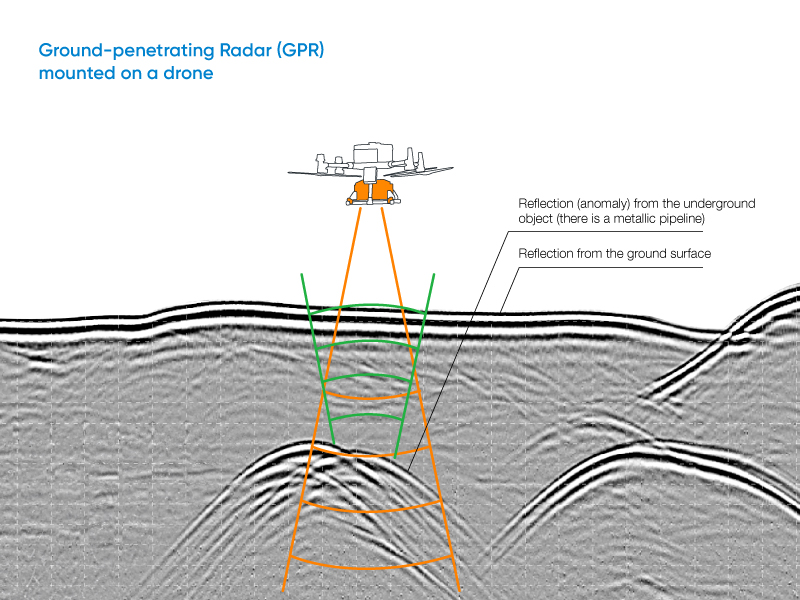
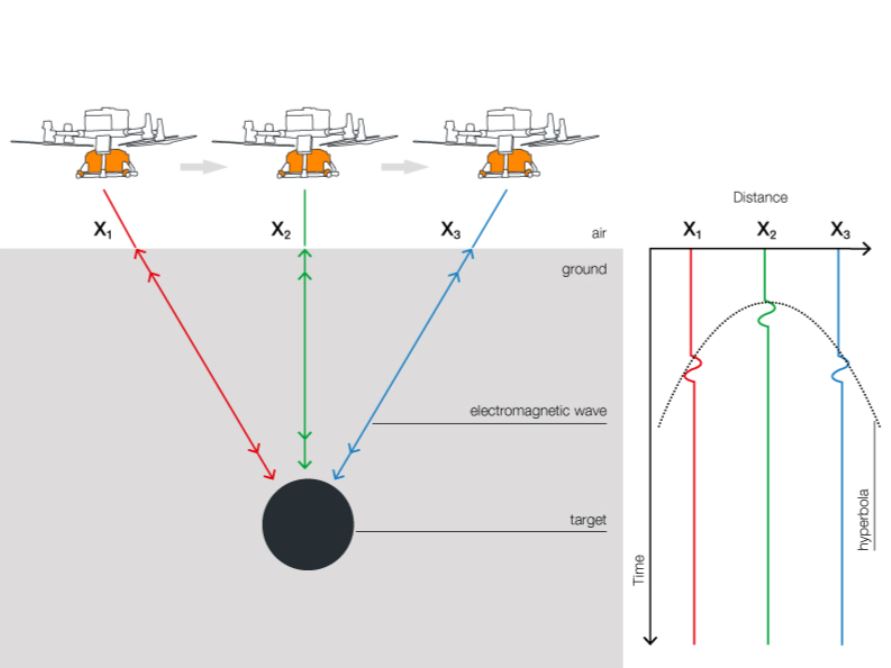
El Radar de Penetración Terrestre (GPR, por sus siglas en inglés) utiliza pulsos de radar para detectar e imaginar objetos y características subterráneas.
Un transmisor de GPR emite energía electromagnética en el suelo.
Cuando la energía encuentra un objeto enterrado o un límite entre materiales con diferentes permitividades dieléctricas (una propiedad que define la velocidad de las ondas electromagnéticas), puede reflejarse hacia la antena receptora del GPR. La electrónica del GPR puede entonces registrar las variaciones en la señal de retorno.
Entregables
Los datos del GPR provienen del sensor en forma digital y no están destinados a la interpretación directa por humanos, a diferencia de las fotos de las cámaras. Requieren software especializado para su procesamiento e interpretación.
Estos métodos de representación de datos de GPR son los más populares, pero existen muchas opciones adicionales, incluyendo la exportación a formatos que pueden ser importados en sistemas CAD y GIS.
|
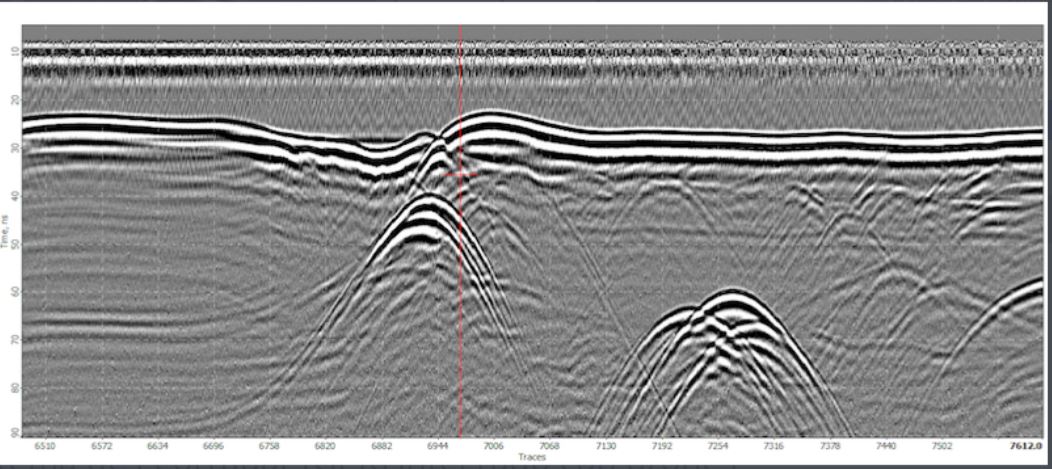
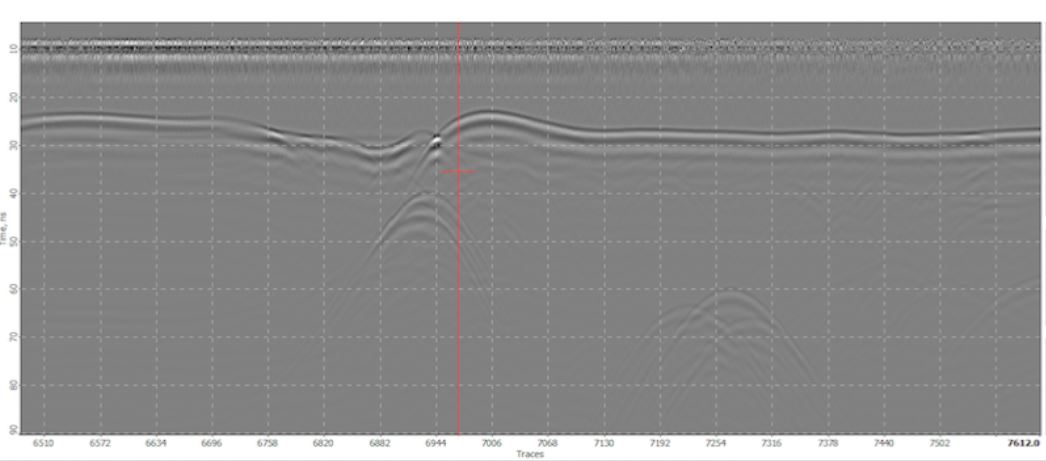
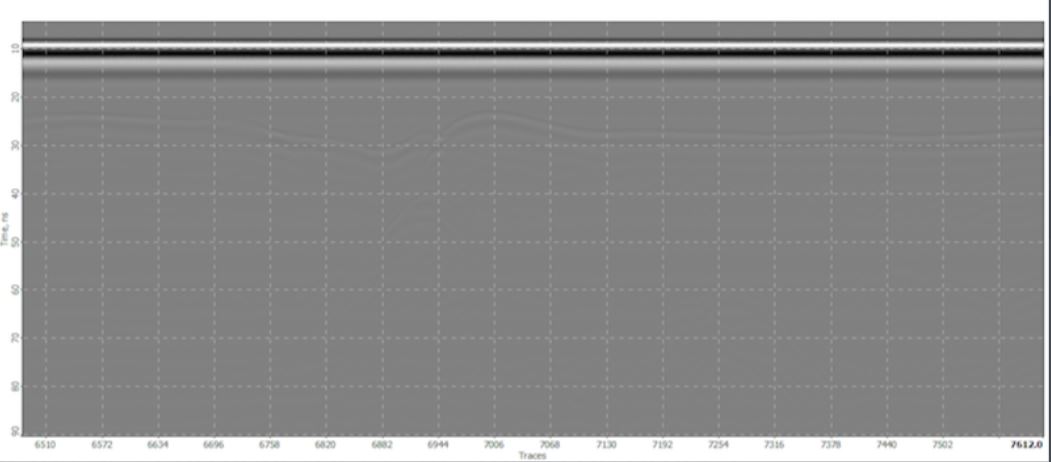
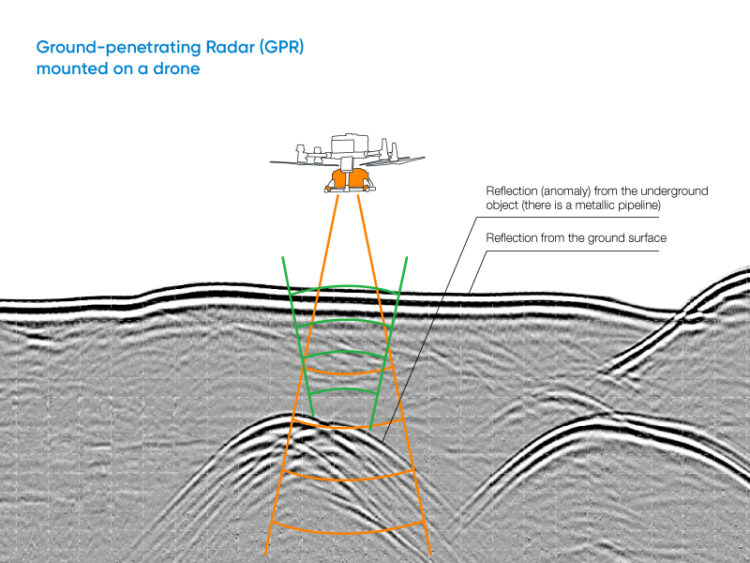
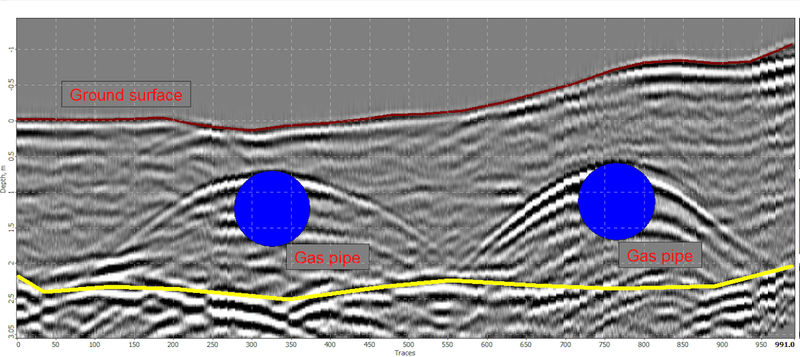
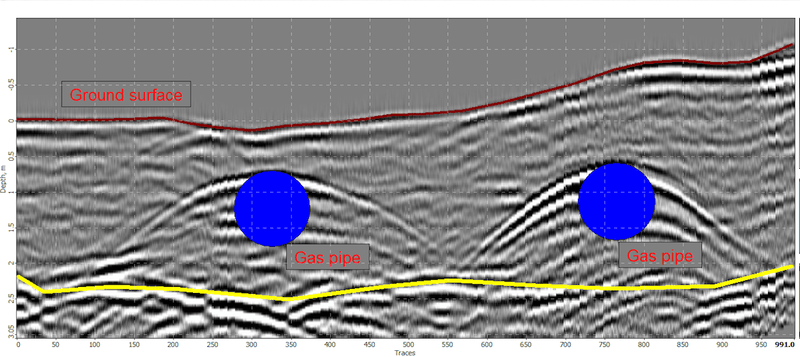
Fig.2 – Perfil de GPR cruzando un gasoducto con interpretación. Los datos fueron recolectados utilizando el sistema GPR Zond Aero 500, procesados e interpretados en el software Prism2 de Radar Systems. |
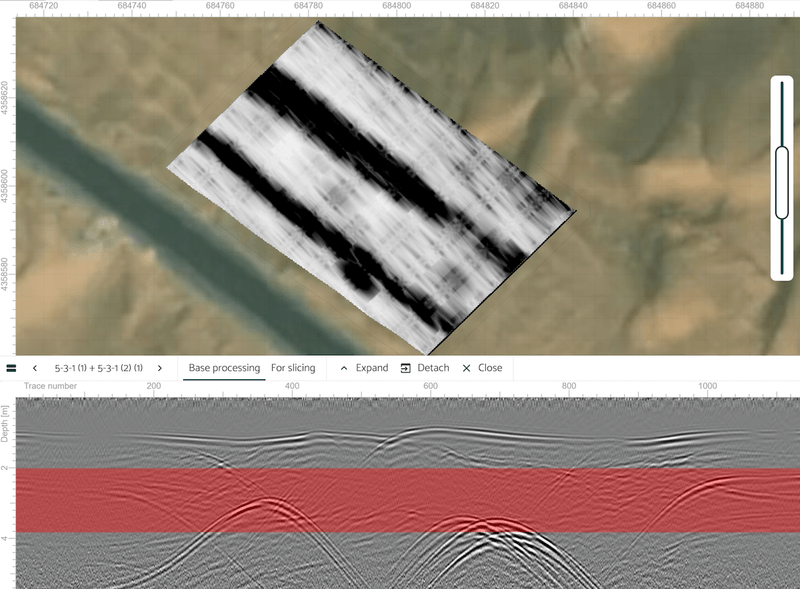
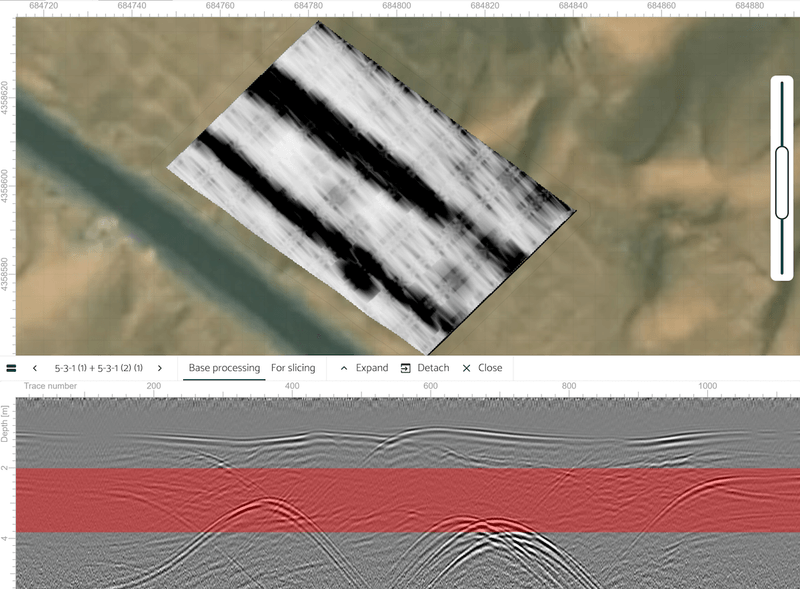
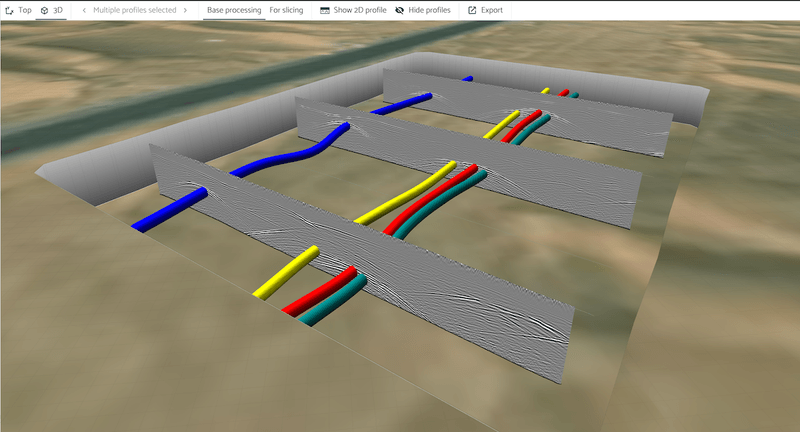
Fig.3 – Sección horizontal del subsuelo para visualizar el recorrido de las instalaciones. Los datos fueron recolectados utilizando el sistema GPR Zond Aero 500 y procesados en Geolitix. |
| Los resultados de las encuestas de GPR pueden presentarse en diferentes formas. El formato más común y “natural” para los datos de GPR es un “perfil”: una sección vertical de datos a lo largo de la línea de la encuesta | Otra forma popular son las secciones horizontales, ya que proporcionan una mejor comprensión de dónde se encuentran los objetos detectados bajo la superficie y sobre la forma de los objetos. |
|
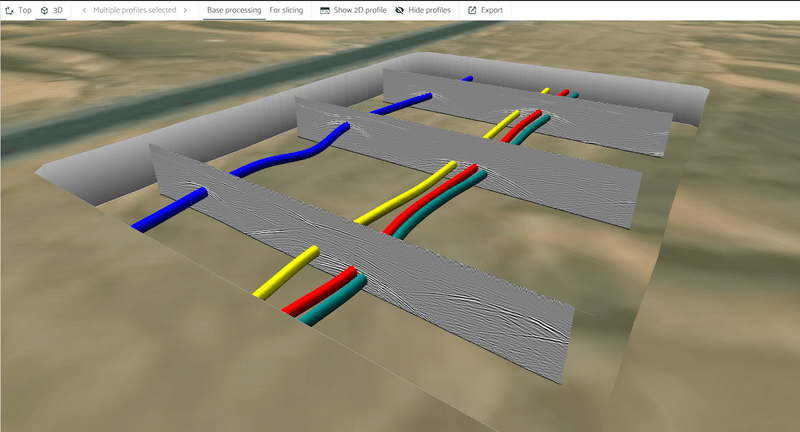
Fig.4 – Representación en 3D de las mismas instalaciones que en la imagen con secciones horizontales. Captura de pantalla de Geolitix. |
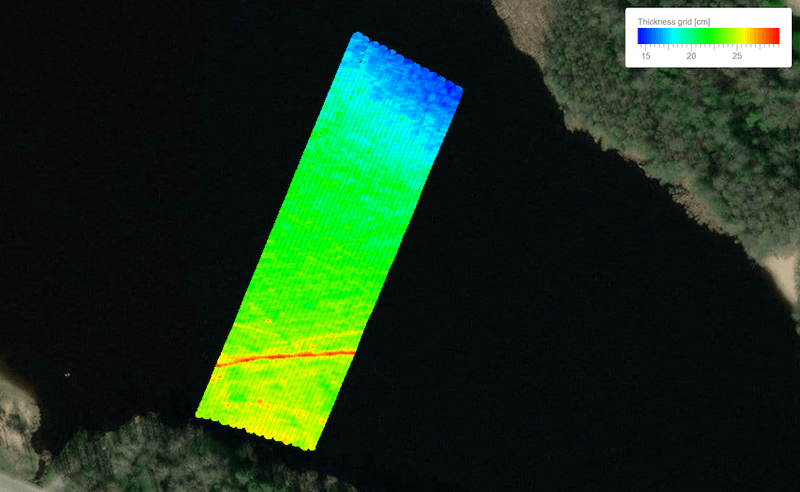
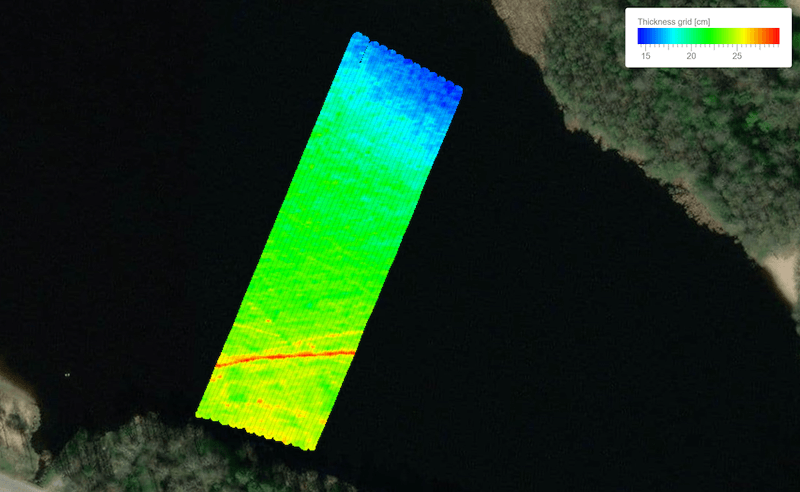
Fig.5 – Rejilla de espesor de hielo. Los datos fueron recolectados utilizando el sistema GPR Zond Aero 1000 y procesados en Geolitix. |
| Muchos clientes prefieren ver reconstrucciones en 3D del mundo subterráneo, y eso también es posible. Requerirá más pasos de procesamiento y preparación, pero como este método proporciona la máxima comprensión en situaciones complejas, se está volviendo cada vez más popular, gracias al software moderno de procesamiento de GPR que simplifica radicalmente esa tarea. | Otro método popular es generar rejillas de espesor, por ejemplo, para responder preguntas como “¿Qué grosor tiene la capa de arena que cubre la roca madre?” o “¿Qué grosor tiene el hielo?”. |
Beneficios del GPR montado en drones El GPR montado en drones implementa el lema “más seguro, más barato, más rápido”. Aquí hay algunas situaciones donde el uso de GPR en drones es beneficioso:
 Terreno accidentado donde las encuestas de superficie pueden ser imposibles (suelo cubierto de hielo y nieve, terreno rocoso e irregular, a través de ríos y en áreas propensas a avalanchas).
Terreno accidentado donde las encuestas de superficie pueden ser imposibles (suelo cubierto de hielo y nieve, terreno rocoso e irregular, a través de ríos y en áreas propensas a avalanchas).- Áreas con riesgos de seguridad o salud para el operador (glaciares con grietas, suelos contaminados, etc.).
- Grandes áreas despejadas donde la productividad de las encuestas terrestres no sería económicamente razonable (por ejemplo, escanear grandes campos para granjas de paneles solares para determinar la profundidad de la roca madre y la presencia de rocas).
¿Por qué necesitamos diferentes sistemas de GPR? Todos los sistemas de GPR utilizan los mismos principios, pero varían en su aplicación debido a las diferentes frecuencias de las antenas:
- Los sistemas de GPR de baja frecuencia penetran más profundamente con menor resolución y son adecuados para objetos más grandes a mayores profundidades.
- Los sistemas de GPR de alta frecuencia ofrecen mayor resolución para objetos más pequeños, pero tienen una penetración limitada.
El diseño de la antena refleja:
- Las antenas de baja frecuencia son más grandes y no están blindadas.
- Las antenas de alta frecuencia son compactas y están blindadas para reducir el ruido.
- La variedad de GPR asegura el sistema adecuado para cada necesidad de investigación subterránea.
01.
|
02.
|
Zond Aero LF con antena de 50 MHz y 3 metros de largoPenetración más profunda posible: hasta unas pocas docenas de metros en suelos de muy baja conductividad (arena seca o rocas), o cientos de metros en hielo, lo que hace que este sistema sea una herramienta excelente para la glaciología y el escaneo profundo. |
Zond Aero LF con antenas de 75…400 MHzEl Zond Aero LF en drones como el DJI M350/M300 RTK puede usarse con antenas en el rango de frecuencia de 75…400 MHz, lo que permite seleccionar la frecuencia adecuada para una aplicación particular. Cambiar la antena toma un par de minutos. |
03.
|
04.
|
Zond Aero 500 MHzUn sistema bastante universal con una antena blindada, capaz de penetrar lo suficientemente profundo para muchas aplicaciones de geofísica de ingeniería y detectar objetos relativamente pequeños o servicios públicos delgados. |
Zond Aero 1000 MHzLa mejor resolución posible y la capacidad de detectar objetivos pequeños, pero la penetración bajo la superficie en condiciones normales será inferior a 0.5 m. |




Aplicaciones
La tabla proporciona un resumen de lo que podemos esperar de los sistemas GPR disponibles para uso en drones y sus aplicaciones recomendadas. Aquí, hemos listado los sistemas GPR fabricados por Radar Systems Inc., Letonia, ya que esta línea de GPR cubre todas las posibles aplicaciones para radares de penetración terrestre montados en drones. Cualquier otro sistema GPR con una frecuencia central similar tendrá más o menos los mismos parámetros prácticos en cuanto a penetración y resolución.
Tenga en cuenta que la penetración y la resolución en ciertos lugares dependen de la composición del suelo, la humedad, la temperatura, etc. En la tabla a continuación, utilizamos los parámetros de un “suelo promedio” típico: una sustancia con una permitividad dieléctrica relativa de 9, baja conductividad y bajo contenido de agua.
A pedido, los sistemas GPR Zond Aero LF pueden venir con antenas para frecuencias centrales personalizadas.
| Frecuencia central, MHz | 1000 | 500 | 300 | 150 | 100 |
|---|---|---|---|---|---|
| Modelo de GPR | Zond Aero 1000 | Zond Aero 500 | Zond Aero LF | Zond Aero LF | Zond Aero LF |
| Penetración desde la superficie, m | 0.5 .. 1 | 2 .. 4 | 4 .. 8 | 8 .. 15 | 15 .. 20 |
| Penetración desde el dron, m | 0.3 .. 0.5 | 1 .. 2 | 2 .. 4 | 4 .. 8 | 7 .. 10 |
| Penetración desde el dron en agua dulce, m (conductividad del agua <200 µS/cm) | – | 0.25 | 2 | 4 | 7 |
| Elevación máxima recomendada de la antena para la encuesta aérea, m | 0.3 (el límite práctico es 0.6m) | 0.6 | 1 | 2 | 3 |
| Tamaño mínimo de objetos detectables bajo la superficie desde la altitud recomendada, cm | 7 | 10 | 20 | 35 | 50 |
| Tamaño mínimo de objetos «profundos» detectables desde la altitud recomendada, cm | 11 a 0.5m | 26 a 2m | 50 a 4m | 100 a 8m | 180 a 15m |
| Diámetro mínimo de objetos lineales no conductivos detectables como una tubería de plástico vacía, cm | 5 | 10 | 17 | 33 | 50 |
| Diámetro mínimo de objetos lineales conductivos detectables como una tubería de metal o una tubería de plástico llena de agua, cm | 5 | 8 | 13 | 27 | 40 |
| Aplicaciones | |||||
| Búsqueda de objetos pequeños |  |
|
|||
| Glaciología, perfilado del grosor de nieve/hielo | |
|
|
|
|
| Estratigrafía geológica • estratigrafía del subsuelo • estructura • superficie de la roca madre | |
|
|
|
|
| Encuestas geotécnicas • búsqueda de cavidades • búsqueda de sumideros | |
|
|
|
|
| Búsqueda de servicios públicos • cables • tuberías de agua y alcantarillado • tuberías de gas • tuberías de petróleo | |
|
|
||
| Mapeo de infraestructura subterránea | |
|
|
||
| Arqueología • artefactos • estructuras ocultas • estratigrafía • cimientos | |
|
|
||
| Arqueología • cuevas • tumbas • túneles | |
|
|
||
| Arqueología forense | |
|
|
||
| Batimetría de agua dulce | |
|
|
||
| Minería y explotación de canteras • rocas • fracturas • fallas • juntas | |
|
|
Buenas prácticas para utilizar el sistema GPR
Estos son los consejos para utilizar eficazmente el sistema GPR. No se trata de una lista exhaustiva, y siempre estamos dispuestos a discutir su solución específica en detalle.
01.Dado que, en el caso del uso aéreo (cuando la antena GPR no está en contacto con la superficie), una parte significativa de la energía del impulso GPR puede reflejarse en la superficie, se espera que la penetración desde un dron sea la mitad de la lograda con una encuesta terrestre en la superficie. La altitud recomendada (o la distancia entre la antena y la superficie) en el caso de una encuesta aérea debe ser menor que la longitud de la onda electromagnética en el aire correspondiente a la frecuencia central de la antena. |
02.La penetración en buenas condiciones, como arena muy seca en el desierto después de la temporada seca, puede ser hasta 2 veces mejor. En condiciones ideales (nieve y hielo), la penetración puede ser de 3 a 4 veces mejor. Condiciones como la arena seca o la nieve/hielo también son muy buenas para el uso aéreo. Si se mantiene la altitud recomendada, no vemos ninguna degradación significativa de la máxima penetración en hielo o nieve en comparación con el uso terrestre. |
03.El tamaño mínimo de un objeto detectable es el diámetro de la superficie plana superior de un objeto subterráneo orientado horizontalmente. A veces (dependiendo de la dirección de viaje del GPR), es imposible detectar una hoja de metal incluso si tiene el doble del tamaño mínimo requerido si, por ejemplo, está posicionada en un ángulo de 45 grados. |
04.“Size mínimo” o “diámetro mínimo” significa que es extremadamente poco probable detectar objetos más pequeños. Pero no se garantiza que será posible detectar objetos más grandes; eso dependerá de docenas de otros factores. |
05.El diámetro del reflector plano detectable se estima utilizando una “regla general” como el 10% de la distancia entre la antena y el objeto (elevación de la antena + profundidad) O la mitad de la longitud de onda en el material anfitrión, el que sea mayor. |
06.El diámetro mínimo de tubos plásticos vacíos detectables se estima como la longitud de onda de la frecuencia central del GPR en el aire dividida por 2. |
07.El diámetro mínimo de objetos conductores detectables (tuberías metálicas, tuberías de plástico llenas de agua) se estima en un 40% de la longitud de onda de la frecuencia central del GPR en un material anfitrión (fuente: Ground‐Penetrating Radar for Geoarchaeology, Lawrence B. Conyers). |
08.NUNCA planifiques encuestas utilizando estimaciones cercanas a los límites de penetración, tamaño de objetos detectables, etc. Siempre utiliza valores más conservadores. |
09.Un error típico de los nuevos usuarios de GPR es pedir un sistema de GPR con máxima penetración y tratar de detectar objetos subterráneos más pequeños con él. Recuerda: una buena máxima penetración significa una mala resolución/capacidad para detectar objetos pequeños. |
10.Al pedir un nuevo sistema de GPR para una aplicación particular, considera qué penetración es necesaria, es decir, no la excedas demasiado. Los clientes potenciales a menudo piden un sistema para búsqueda de servicios con una penetración máxima de hasta 20 m. Sin embargo, la profundidad habitual de tuberías/cables es de 1-2 m. Es mucho mejor pedir un sistema de 500 MHz, que permitirá la detección de objetos más pequeños/finos. |
11.Una capa de arcilla, incluso con una pequeña cantidad de agua, arruinará la imagen adquirida. Si hay arcilla o suelo arcilloso en el área de la encuesta, esta debe planificarse después de una temporada seca o un largo período de tiempo seco. |
12.Las ondas electromagnéticas no penetran a través del agua salada. Por lo tanto, el GPR no se puede utilizar para batimetría en mar/agua salada. |
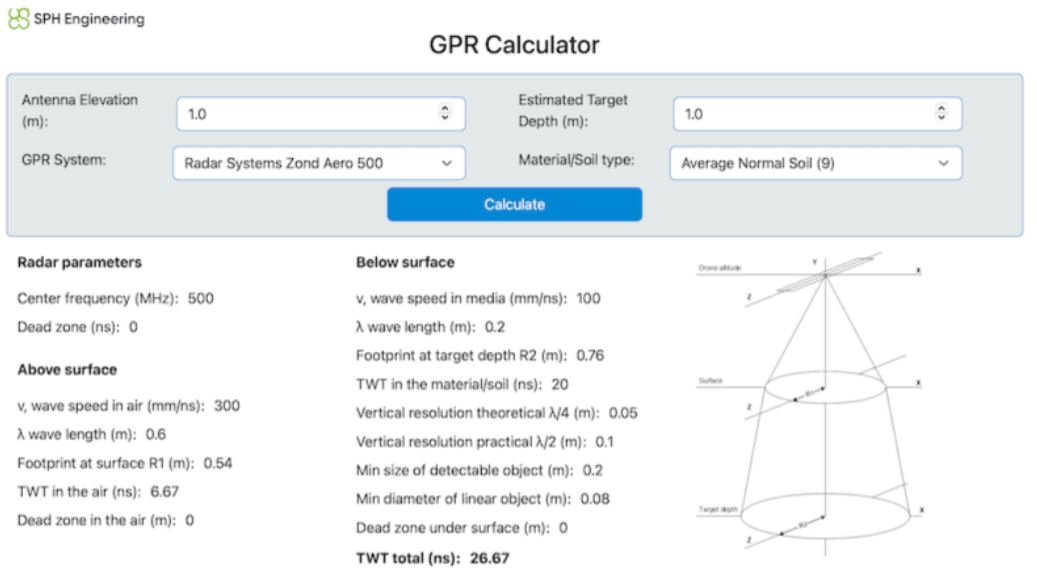
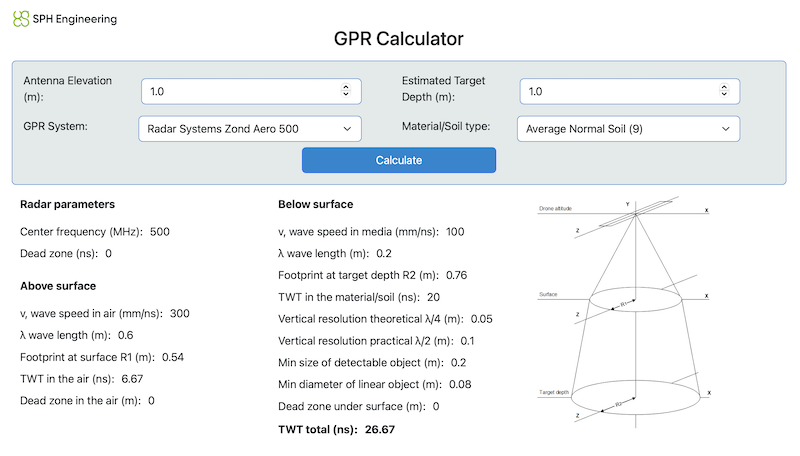
Calculadora de GPR de SPH Engineering
La calculadora de GPR se puede utilizar para estimar la detectabilidad de objetivos a una profundidad y altitud de vuelo (elevación de la antena) particulares.
Ingresa información sobre la Elevación de la Antena, el tipo de sistema GPR, la Profundidad Estimada del Objetivo y el tipo de Material/Suelo para obtener los resultados.
Componentes del sistema
Los sistemas magnetométricos montados en drones no sólo incluyen el dron y la carga útil del magnetómetro. SPH Engineering suministra soluciones integrales para cada aplicación concreta.
Drones compatibles: DJI M300/M350/M600, Inspired Flight IF1200A o IF800, Harris Aerial H6, y Wispr Ranger Pro y UAV similares
 |
 |
 |
 |
 |
Radar de Penetración TerrestreGPR integrado con montajes para el dron |
Ordenador de a bordo SkyHubActúa como registrador de datos del magnetómetro e implementa el modo True Terrain Following |
Altímetro láser o radarAltímetro láser o radar para volar automáticamente en modo de seguimiento del terreno |
Software de planificación de vuelos UgCSSoftware de control en tierra con funciones especializadas para levantamientos magnetométricos, esencial para una recogida de datos precisa |
Software de tratamiento de datosProgramas informáticos de tratamiento de datos para el tratamiento inicial (limpieza y filtrado de datos) y la generación de resultados. |
Productos relacionados con Sistema de Georradar (GPR) integrado con drones :
Licencia + actualizaciones perpetuas + soporte
Licencia perpetua + 1 año de actualizaciones REDtoolbox

Georradar GPR Zond Aero LF de baja frecuencia

Sistema de magnetómetro para drones