Necesarias
Las cookies estrictamente necesarias permiten la funcionalidad principal del sitio web, como el inicio de sesión de usuario y la gestión de cuentas. El sitio web no se puede utilizar correctamente sin las cookies estrictamente necesarias.
Nombre
PHPSESSID
Dominio
grupoacre.es
Vencimiento
Sesión
Descripción
Cookies generada por las aplicaciones basadas en el lenguaje PHP. Se trata de un identificador de propósito general usado para mantener las variables de sesión de usuario. Normalmente es un número generado al azar, cómo se utiliza puede ser específica para el sitio, pero un buen ejemplo es el mantenimiento de una sesión iniciada en el estado de un usuario entre las páginas.
Nombre
qtrans_front_language
Dominio
grupoacre.es
Vencimiento
1 año
Descripción
Cookie necesaria para la utilización de las opciones y servicios del sitio web.
Nombre
__stripe_mid
Dominio
grupoacre.es
Vencimiento
1 año
Descripción
Cookie necesaria para la utilización de las opciones y servicios del sitio web
Nombre
__stripe_sid
Dominio
grupoacre.es
Vencimiento
Sesión
Descripción
Cookie necesaria para la utilización de las opciones y servicios del sitio web
Nombre
SEARCH_SAMESI TE
Dominio
google.com
Vencimiento
6 meses
Descripción
SameSite evita que el navegador envíe esta cookie junto con las solicitudes entre sitios. El objetivo principal es mitigar el riesgo de fuga de información de origen cruzado. También proporciona cierta protección contra ataques de falsificación de solicitudes entre sitios.
Nombre
YSC
Dominio
youtube.com
Vencimiento
Sesión
Descripción
Registra una identificación única para mantener estadísticas de qué videos de YouTube ha visto el usuario.
Nombre
1P_JAR
Dominio
google.com
Vencimiento
1 mes
Descripción
Estas cookies se establecen a través de vídeos de youtube incrustados. Registran los datos estadísticos anónimos sobre, por ejemplo, cuántas veces se reproduce el vídeo y las configuraciones que se utilizan para la reproducción.
Nombre
VISITOR_INFO1_LIVE
Dominio
youtube.com
Vencimiento
6 meses
Descripción
Intenta estimar el ancho de banda de los usuarios en las páginas de YouTube con videos integrados.
Nombre
__Secure-3PAPISI D
Dominio
youtube.com
Vencimiento
2 años
Descripción
Estas cookies se utilizan para entregar anuncios más relevantes para usted y sus intereses.
Nombre
__Secure-3PSID
Dominio
youtube.com
Vencimiento
2 años
Descripción
Estas cookies se utilizan para entregar anuncios más relevantes para usted y sus intereses.
Rendimiento
Las cookies de rendimiento se utilizan para ver cómo los visitantes utilizan el sitio web. Por ejemplo: cookies analíticas. Son aquellas que permiten al usuario la navegación a través de una página web, plataforma o aplicación y la utilización de las diferentes opciones o servicios que en ella existan
Nombre
_ga
Dominio
grupoacre.es
Vencimiento
2 años
Descripción
<strong>Google Analytics</strong>: ID utiliza para identificar a los usuarios
Nombre
_gat
Dominio
grupoacre.es
Vencimiento
1 minuto
Descripción
Esta cookie está asociada a Google Universal Analytics, según la documentación se utiliza para regular la tasa de solicitudes – limitando la recogida de datos en sitios de alto tráfico.
Nombre
_gid
Dominio
grupoacre.es
Vencimiento
20 horas
Descripción
<strong>Google Analytics</strong>: ID utiliza para identificar a los usuarios durante 24 horas después de la última actividad
Nombre
APISID
Dominio
google.com
Vencimiento
2 años
Descripción
Descargar ciertas herramientas de Google y guardar ciertas preferencias, por ejemplo, el número de resultados de la búsqueda por hoja o la activación del filtro SafeSearch. Ajusta los anuncios que aparecen en la búsqueda de Google.
Nombre
HSID
Dominio
google.com
Vencimiento
2 años
Descripción
Descargar ciertas herramientas de Google y guardar ciertas preferencias, por ejemplo, el número de resultados de la búsqueda por hoja o la activación del filtro SafeSearch. Ajusta los anuncios que aparecen en la búsqueda de Google
Nombre
NID
Dominio
google.com
Vencimiento
7 meses
Descripción
Estas cookies se utilizan para recopilar estadísticas del sitio web y rastrear las tasas de conversión y la personalización de anuncios de Google
Nombre
SAPISID
Dominio
google.com
Vencimiento
2 años
Descripción
Descargar ciertas herramientas de Google y guardar ciertas preferencias, por ejemplo, el número de resultados de la búsqueda por hoja o la activación del filtro SafeSearch. Ajusta los anuncios que aparecen en la búsqueda de Google.
Nombre
SID
Dominio
google.com
Vencimiento
2 años
Descripción
Descargar ciertas herramientas de Google y guardar ciertas preferencias, por ejemplo, el número de resultados de la búsqueda por hoja o la activación del filtro SafeSearch. Ajusta los anuncios que aparecen en la búsqueda de Google.
Nombre
SIDCC
Dominio
google.com
Vencimiento
1 año
Descripción
Descargar ciertas herramientas de Google y guardar ciertas preferencias, por ejemplo, el número de resultados de la búsqueda por hoja o la activación del filtro SafeSearch. Ajusta los anuncios que aparecen en la búsqueda de Google.
Nombre
SSID
Dominio
google.com
Vencimiento
2 años
Descripción
Descarga ciertas herramientas de Google y guarda ciertas preferencias, por ejemplo, el número de resultados de búsqueda por página o la activación del filtro SafeSearch. Ajusta los anuncios que aparecen en la Búsqueda de Google.
Nombre
VISITOR_INFO1_L IVE
Dominio
youtube.com
Vencimiento
6 meses
Descripción
Intenta estimar el ancho de banda de los usuarios en las páginas de YouTube con videos integrados.
Segmentación
Las cookies de segmentación se utilizan para identificar a los visitantes entre diferentes sitios web. Por ejemplo: socios de contenido, redes de banners. Las empresas pueden utilizar esas cookies para crear un perfil de los intereses de los visitantes o mostrar anuncios relevantes en otros sitios web.
Nombre
_gcl_au
Dominio
grupoacre.es
Vencimiento
3 meses
Descripción
Utilizado por Google AdSense para experimentar con la eficacia de los anuncios en los sitios web que utilizan sus servicios
Nombre
IDE
Dominio
doubleclick.net
Vencimiento
1 año
Descripción
Esta cookie se utiliza para la orientación, el análisis y la optimización de las campañas publicitarias en DoubleClick / Google Marketing Suite.
Nombre
visitor_id
Dominio
pardot.com
Vencimiento
2 años
Descripción
Estas cookie almacena el Id. del visitante único estableciendo un código de seguimiento para Pardot.
Nombre
pardot
Dominio
pardot.com
Vencimiento
2 años
Descripción
Cuando inicia sesión como usuario de Pardot. Esta cookie no se establece en el navegador del visitante.
Nombre
pi_opt_in
Dominio
pardot.com
Vencimiento
6 meses
Descripción
Se establece esta cookie con un valor verdadero o falso cuando el visitante se suscribe o anula la suscripción del seguimiento.
Nombre
lpv
Dominio
pardot.com
Vencimiento
2 años
Descripción
Esta cookie LPV está configurada para evitar que Pardot rastree múltiples vistas de página en un solo activo durante una sesión de 30 minutos. Por ejemplo, si un visitante recarga una página de destino varias veces durante un período de 30 minutos, esta cookie evita que cada recarga sea rastreada como una vista de página.





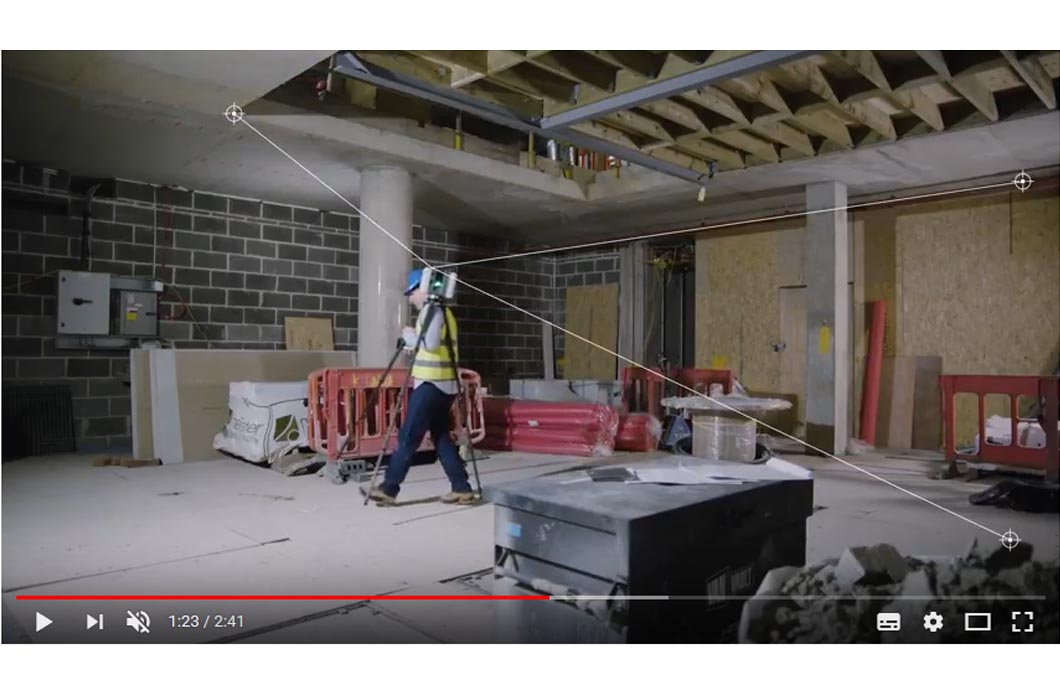
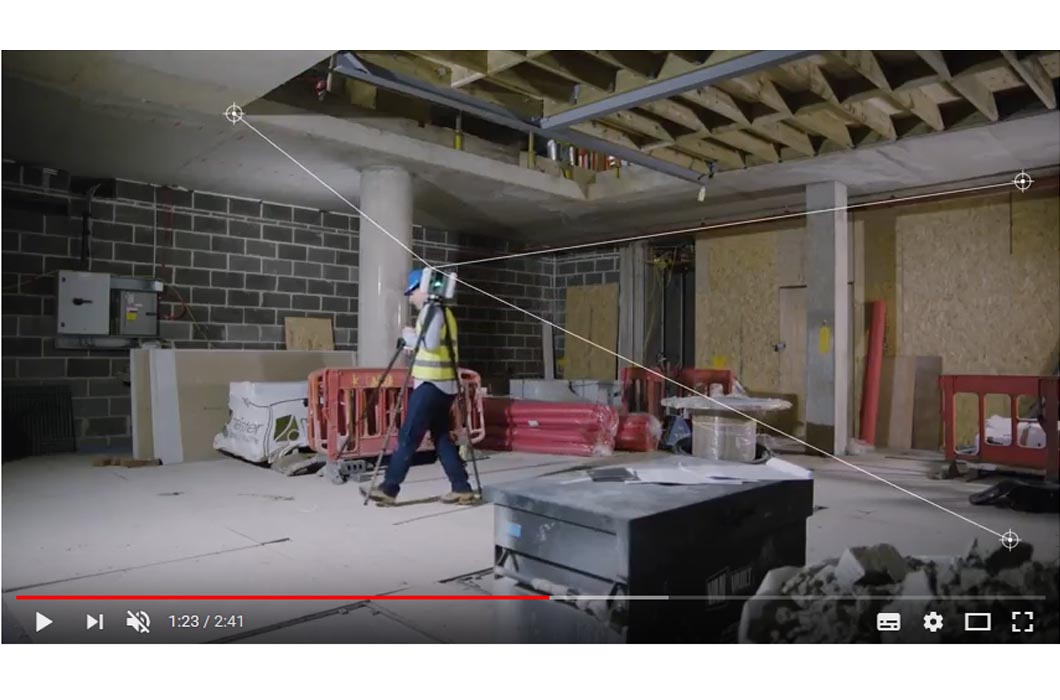
 Láser escáner Leica RTC 360
Láser escáner Leica RTC 360 El registro basado en la aplicación y los datos de etiquetado se devuelven automáticamente de la tableta al escáner
El registro basado en la aplicación y los datos de etiquetado se devuelven automáticamente de la tableta al escáner